Stepper-Motor-Gearbox

This worm gearbox is designed for Nema 23 Stepper Motor or other 57mmx57mm size motor, the output shaft is offset by 90° from the drive shaft. The advantage of this gearbox is its efficiency and self-locking. Besides big cases, no gap structure of box means a maintenance-free that is hermetically sealed. It prevents the lubricant from easily losing and going bad, and exchanging.
Stepper Motor Description
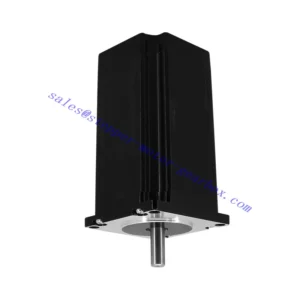
NEMA 23 is a high torque hybrid bipolar stepper motor with a 2.3×2.3 inch faceplate. This motor has a step angle of 1.8 deg., which means that it has 200 steps per revolution and for every step, it will cover 1.8°. The motor has four color-coded wires (Black, Green, Red & Blue) terminated with bare leads. Black and Green wire is connected with one coil; Red and Blue are connected with the other. This motor can be controlled by two H-bridges but it is recommended to use a stepper motor driver.
High torque stepper motor with NEMA 23 (56 mm) integrated connector. Sca5618 has three lengths and two different windings.
●Keep the torque up to 2.3 nm
●1.8 ° step angle
●Integrated connector
How to use Stepper Motor
As mentioned on the left, this stepper motor consumes high current, so don’t use the H-bridge to control it directly, but use a suitably powerful stepper motor driver. To understand how to make this motor spin, we should look at the coil diagram on the left.
As you can see from the picture on the left, the motor has four wires of different colors. This motor can only be rotated when the coils are energized in a logical sequence. This logic sequence can be programmed using a microcontroller or by designing digital circuits.
Our Products
-

Assembled SCARA 4 Axis Stepper Motor Robot Mechanical Arm Hand Manipulator
-
High quality Nema23 stepper motor 425oz 3Nm 112MM length 23HS11230 for cnc
-
NEMA 34 Reducer Drive DC Stepper Servo Motor 60mm 90mm 120mm Flange Mounting Gear Case Transmission Stepper Motor Gearbox
-
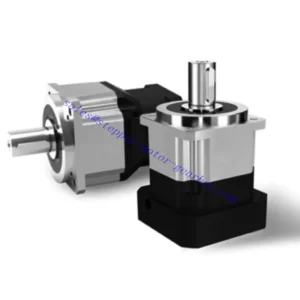
One Stage Gear Ratio 4:1 5:1 10:1 Nema 23 34 42 Stepper Motor Gear Speed Reducer Planetary Gearbox,Geared Stepper Motor
-
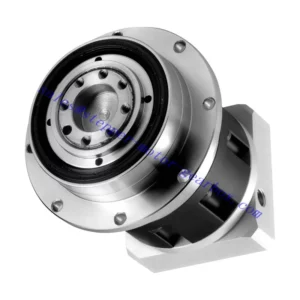
Servo NEMA34 23 High Precision planetary reducer hollow output stepper motor gearbox
-
Worm gear stepper motor NEMA 34 with NMRV40 worm reducer



Why use a gearbox with a stepper motor?
Stepper motors are known for their accurate positioning capabilities and high torque delivery at low speeds, but they require careful sizing to ensure the motor matches the load and application parameters, to minimize the possibility of lost steps or motor stalling. Adding a gearbox to a stepper motor system can improve the motor’s performance by decreasing the load-to-motor inertia ratio, increasing torque to the load, and reducing motor oscillations.